ros2env - ROS2 Environment ManagerSimplify ROS2 development using isolated Docker environments in VS Code with 1-click management. Installation Launch VS Code Quick Open ( Ctrl+P), paste the following command, and press enter.Copied to clipboard |

🤖 ros2env - Simplifying ROS2 Developmentros2env is a Visual Studio Code extension that helps you manage isolated ROS2 environments with ease - start, stop, switch, and interact with them directly from your editor. Whether you're working on multiple ROS2 projects or want to simplify environment switching, ros2env provides a seamless developer experience inside VS Code. 🌐 Visit the Landing Page – Explore features, guides, and videos in one place.
🎥 Demonstration Videos🎥 Demo Video (Watch here)
🎥 Step by Step Installation Video (Watch here)
✨ Why ros2env?
🚀 Features
🧰 RequirementsBefore using ros2env, ensure the following is installed on your system:
📦 InstallationSimply search for ros2env in the VS Code Marketplace and click install. 🧪 Getting Started➕ 1. Create a new ROS2 Environment
🎉 A new isolated ROS2 environment will be created with a ready-to-use workspace. 🔁 2. Load (Switch to) an Environment
This will:
💻 3. Open a ROS 2 Terminal
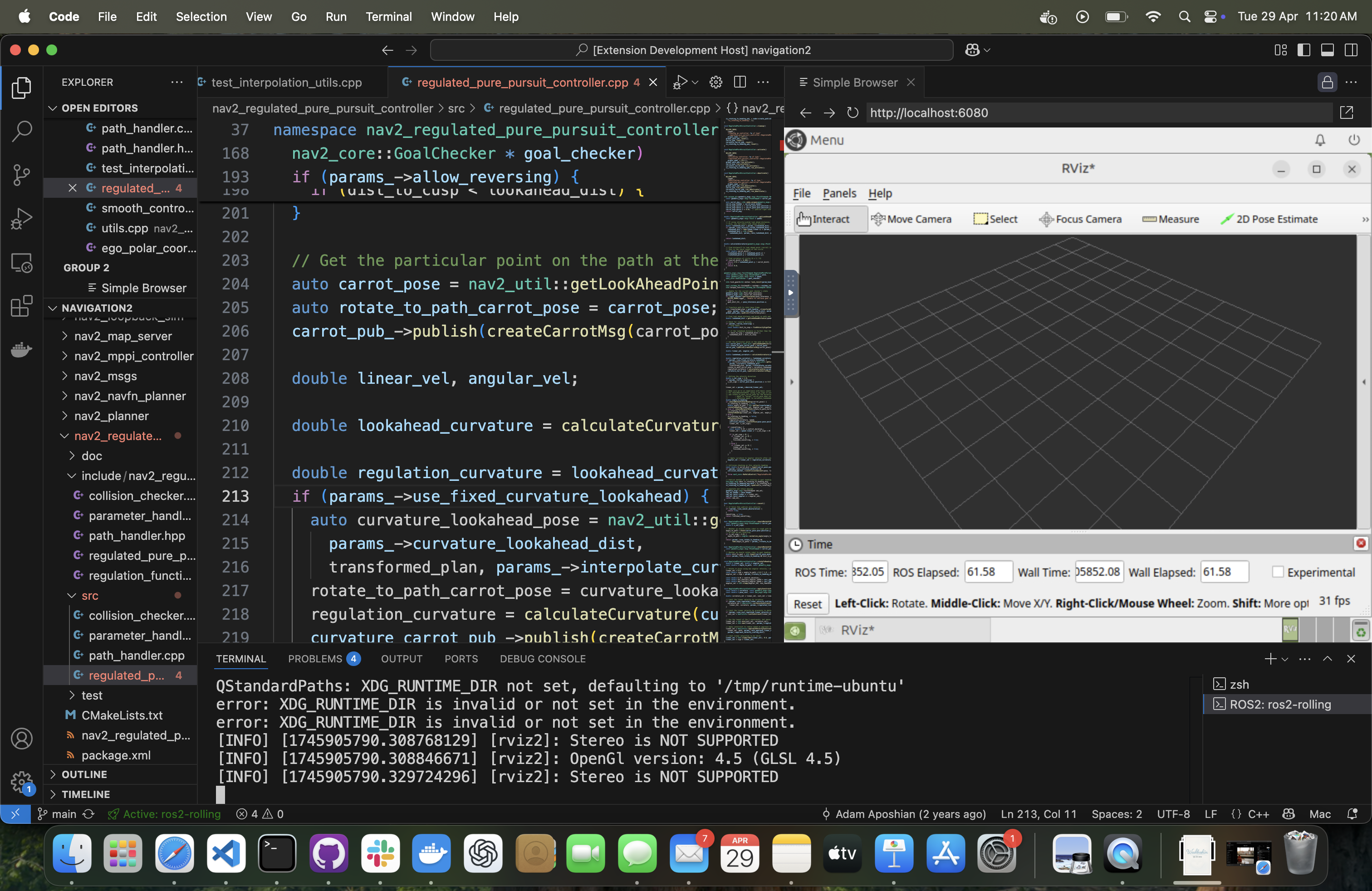
You're ready to build, source, and run ROS2 nodes like usual. 🖥️ 4. Launch GUI Tools
🛑 5. Stop an Environment
🗑️ 6. Delete an Environment
⚠️ This will stop and delete the selected environments. Use with caution. 💬 Support and Feedback
🛡️ LicenseMIT License © Sakshay Mahna 🧩 Related Links |